칼만필터를 이용하여 센서퓨전 연구를 했었는데 기초를 다지고 싶어 책을 폈습니다. '칼만필터는 어렵지 않아' 이 책을 다 읽었을 때 칼만필터 마스터가 되어있길 기대합니다.

Ch 01 평균 필터
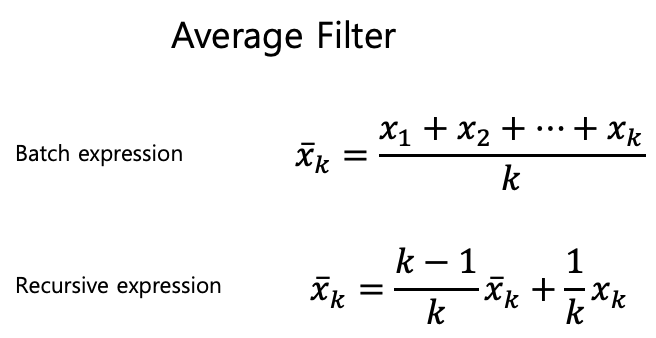
연속적인 연산을 표현할 때 두 가지 방법으로 표현할 수 있습니다.
- 배치식(Batch Expression) : 데이터를 한번에 표현하는 방식
- 재귀식(Recursive Expression) : 이전 결과를 다시 활용하는 방식
재귀식이 구현 과정과 유사하기 때문에 필터를 수식으로 표현할 때는 재귀식이 좋습니다.
1.1 평균의 재귀식
Ch 02 이동평균 필터
단기적인 변동에 현혹되지 않고 중장기 추이를 파악할 수 있습니다.
필터링 결과에 시간지연이 발생합니다. 평균을 구하는 데이터가 많아질수록 시간지연이 크게 발생합니다.
2.1 이동평균의 재귀식

2.2 이동평균의 구현
이동평균은 정해진 개수 n개의 합을 계산하므로 데이터 개수가 증가하더라도 연산량이 증가하지 않습니다. 그러므로 재귀식 연산으로 인한 이득이 다른 필터에 비해 적습니다.
이동평균은 k번째를 계산하는 과정에서 k-n번째 데이터가 필요하므로 최근 n개의 데이터(k-n~k-1번째)를 저장할 버퍼가 필요합니다.
버퍼의 초깃값을 0으로 하는 것보다 첫번째 데이터로 채우는 것이 좋습니다.
Ch 03 저주파 통과 필터(Low-pass filter)
저주파 신호는 통과시키고, 고주파 신호는 걸러내는 필터입니다.
잡음 제거용으로 많이 사용됩니다.
개념에 대헤 이해하려면 frequency domain에서 분석해야 합니다.(이 책에서는 다루지 않음)
3.1 이동평균 필터의 한계
시간지연으로 인해 잡음제거와 민감성을 한 번에 잡을 수 없습니다.
3.2 1차 저주파 통과 필터
모든 데이터를 같은 비중을 두고 평균을 내는 이동평균 필터와는 달리, 저주파 통과 필터는 최근 데이터에 더 높은 가중치를 부여합니다.

이때, alpha는 0~1 사이 값을 가지므로 최근 측정된 데이터가 더욱 크게 반영되는 것을 확인할 수 있습니다.
가중치가 지수함수 형태인 이동평균과 유사하므로 지수 가중 이동평균 필터(Exponentially weighted moving average filter)라고도 합니다.
'Control' 카테고리의 다른 글
| [Control] 고주파 통과 필터 (2) | 2025.01.09 |
|---|---|
| [Control] 파티클 필터 (0) | 2025.01.07 |
| [Control] 무향 칼만 필터(UKF) (1) | 2025.01.05 |
| [Control] 확장 칼만 필터(EKF) (3) | 2025.01.04 |
| [Control] 칼만 필터 (3) | 2025.01.03 |