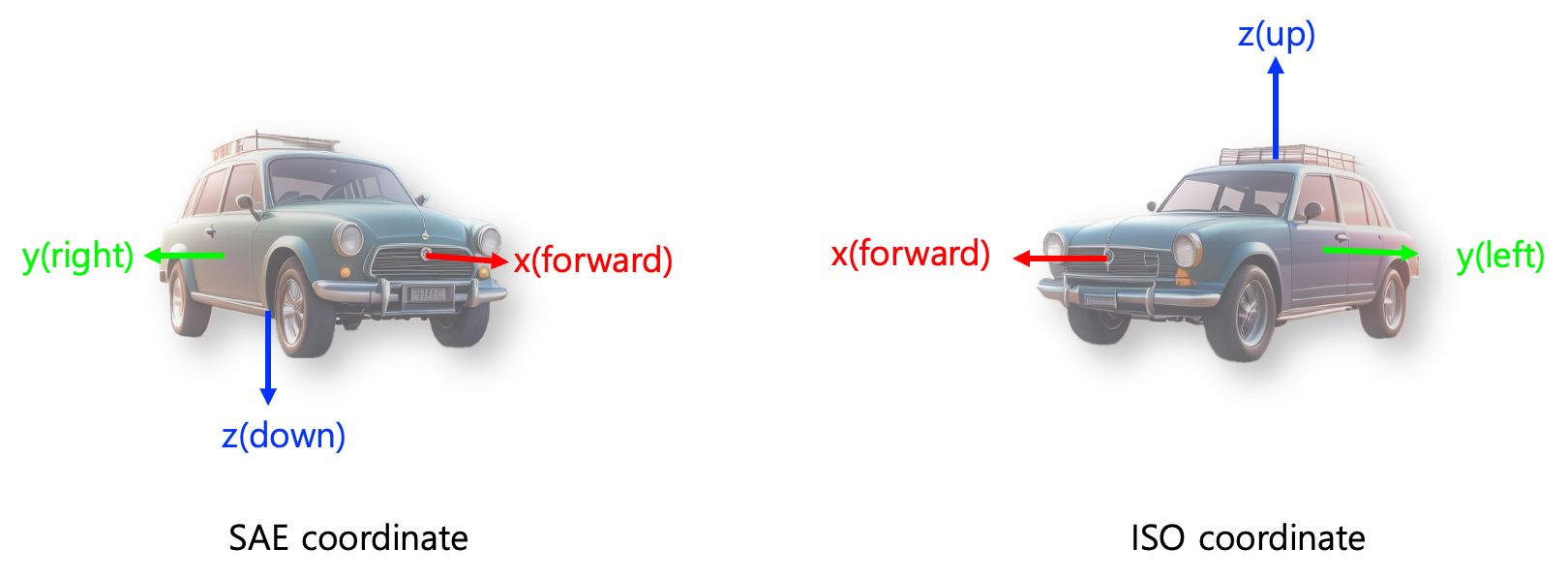
1. Carla Coordinate SystemCarla Docs를 참고하면 Carla는 UE(Unreal Engine) 좌표계를 따릅니다. UE 좌표계는 왼손 좌표계로 되어있어 벡터 연산할 때나 시각화할 때 헷갈리는 상황이 많이 발생했습니다. 왼손 좌표계를 보면 y축의 방향이 오른손 좌표계와 반대로 되어 있습니다. 저는 x, y 방향벡터의 외적이 +z 방향인 오른손 좌표계에 익숙하기 때문에 오른손 좌표계로 변환하여 개발했습니다. 2. Vehicle Coordinate차량 개발에 주로 이용되는 좌표계는 SAE 좌표계와 ISO 좌표계가 있습니다. 두 좌표계 모두 오른손 좌표계로 되어있고, z방향이 위인지 아래인지의 차이가 있습니다. 사실 좌표계의 일관성을 유지하면 어느 좌표계를 이용하든지 상관이 없지만,..